Kanishk
Navale
Stuttgart 🇩🇪
Fine Arts
Robotics
Math Optimization
Reinforcement Learning
Deep Learning
Computer Vision
AI Agents
// Projects
drag or scroll →

// Career Odyssey
↓ scroll
Greenbone AG
AI Engineer
02.2024 – Present · Stuttgart, Germany
Engineering secure AI-agents and intelligent vulnerability management
systems, pushing the boundary of what autonomous security tooling can do.
Sereact GmbH
Senior Deep Learning Engineer
11.2022 – 01.2024 · Stuttgart, Germany
Led the design & development of a vision-based LLM for robots. Initially,
fine-tuned a foundation model with LoRA. Later, integrated it with a 'Point Transformer-2'
architecture using modified geodesic multi-head self-attention for enhanced robot & object
interaction boosting number of pick & place operations.
Sereact GmbH
Master Thesis Student
05.2022 – 11.2022 · Stuttgart, Germany
Developed an end-to-end deep learning model that regresses the
generalised
object representations as visual dense descriptors (embeddings) while additionally
regressing object pose invariant 3D keypoints. The DNN (Deep Neural Network) was
optimised
using a self-supervised geometry aware loss functions, eliminating the need for manual
annotated labels. The master thesis was awarded a '1.3' which is an excellent grade.
Bosch Center for AI
Intern — Reinforcement Learning & Planning
11.2021 – 04.2022 · Renningen, Germany
Implemented oriented bounding-box pruning & grouping for visual object
pose
registration using a DNN regressed feature space. The DNN feature space was optimized on
the
pixelwise distributional loss & agglomerative hierarchical clustering.
Max Planck Institute
Work Student - Research Assistant
04.2021 – 10.2021 · Stuttgart, Germany
Integrated a robot physics engine from scratch, introducing hybrid
motion
force control to the NYU-Finger robot (a leg of a quadruped robot) with the in-house
fabricated capacitive haptic sensor with robust real-time state estimation.
FANUC India Pvt. Ltd.
Robot System Engineer
06.2016 – 08.2018 · Bangalore, India
Commissioned 48 industrial robots, 2D/3D vision, machine tending & IoT
systems as part of the design & site deployment team. The technical & commercial
proposals
pitched generated revenues more than the set yearly target.
// About
Before code or robots, there were pencils and sketches — my first tools for understanding the world. Designing & imagining structures led me into robotics, where ideas transformed into moving, tactile systems. AI expanded that horizon, giving me the ability to build machines that not only act, but also perceive and learn. I'm growing by embracing the fusion of art, mechanics, and intelligence.
// School Compass
→
M.Sc. Computer Science
Universität Stuttgart 🇩🇪
10.2019 – 10.2022
Designed information maximization variation encoder (Info-VAE) for
high
data dimensional analysis & decomposition to its latent state, securing top-2 in the
class.
B.E. Automation & Robotics
BVBCET 🇮🇳
06.2012 – 06.2016
Led student team of size 10 to participate in ABU-Robocon
international
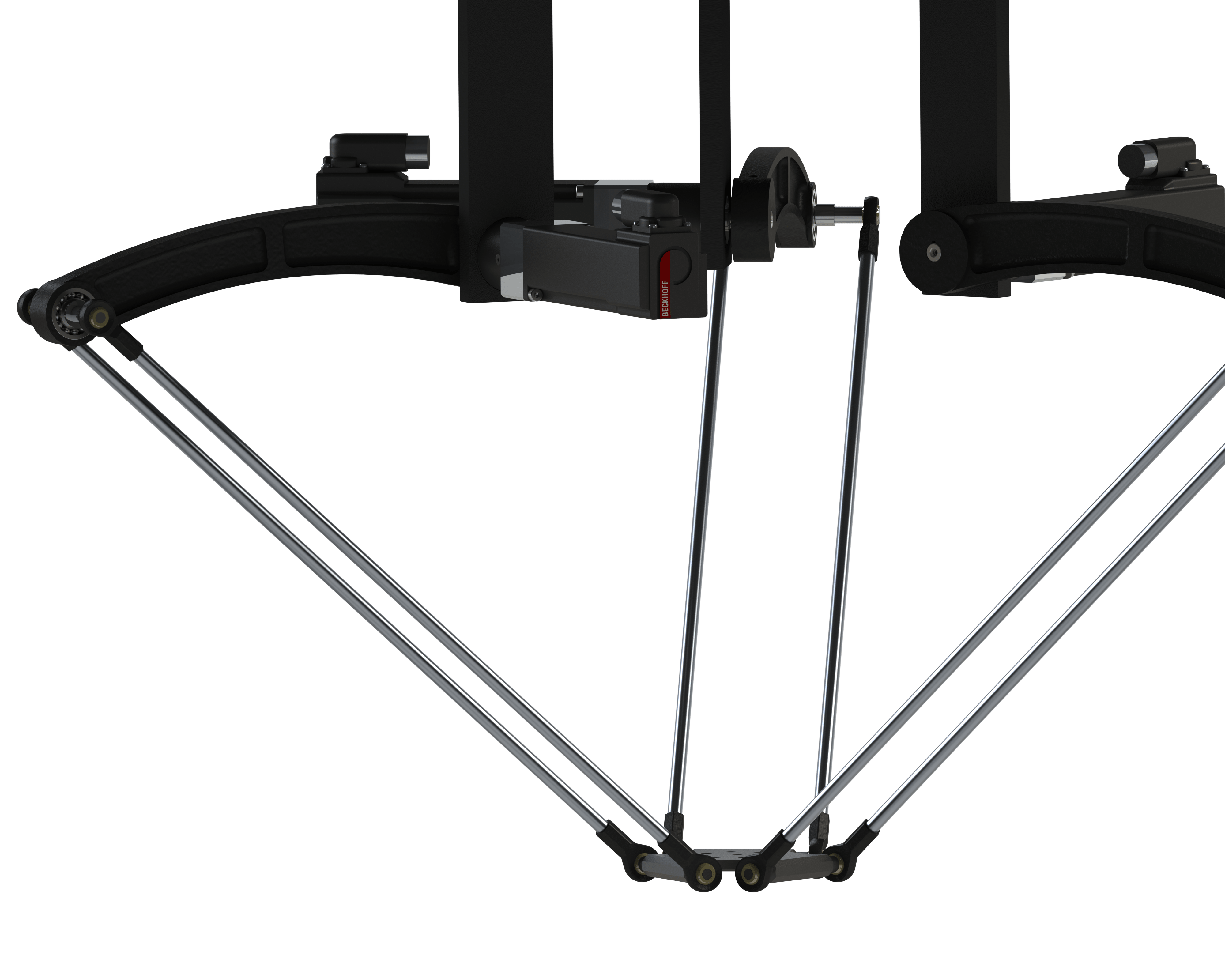
event engineering 2 badminton playing robot. Furthermore, built a delta-style parallel
robot
for the bachelor's graduation project.